Rubriken

Die Gefahr muss frühzeitig erkannt werden

Was sind die Vorteile der neuen Technologie gegenüber den bisherigen Kollisionserkennungssystemen?
Standard Sensoren, die für Fahrerassistenzsysteme verwendet werden wie Lidar, Radar, Ultraschall und Kamera, benötigen meistens eine direkte Sichtverbindung zu anderen Verkehrsteilnehmenden, um diese zu erkennen und um entsprechend zu reagieren. Wir haben uns nun gefragt, können wir sogar schon vorher Bewegungen erkennen – sozusagen ein Frühwarnsystem entwickeln? Wir haben uns überlegt ob wir z.B. Schatten als Signal verwenden könnten und auch direkt an erste Ergebnisse einer Nachbarforschungsgruppe unter der Leitung von Prof. Freeman anschließen können. Unser System kann nun von einer fahrenden Plattform aus, schwache Lichtsignale am Boden erkennen und autonom darauf reagieren. Eine potentiell gefährliche Situation kann beispielsweise durch Abbremsen verhindert werden.
Auf welcher technischen Basis setzt die Kollisionserkennung durch Schatten auf?
Wir verwenden eine Kamera montiert auf einem selbst-fahrenden elektrischen Rollstuhl und einen Bildverarbeitungsalgorithmus, den wir entwickelt haben, um andere sich auf Kollisionskurs bewegende Objekt frühzeitig zu erkennen. Zwei grundlegende Elemente des Verfahrens sind zum einen die Bildstabilisierung und zum anderen die geschickte Verstärkung eines schwachen Lichtsignals – wie einem Schatten. Wir arbeiten aktuell auch an der Weiterentwicklung, sodass eine „visual odometry“ Methode die Marker auf dem Boden ersetzt.

Die Schritte des „ShadowCam“ Verfahrens im Überblick. Entscheidend ist im Schritt (5) die Verstärkung des schwachen Signals.
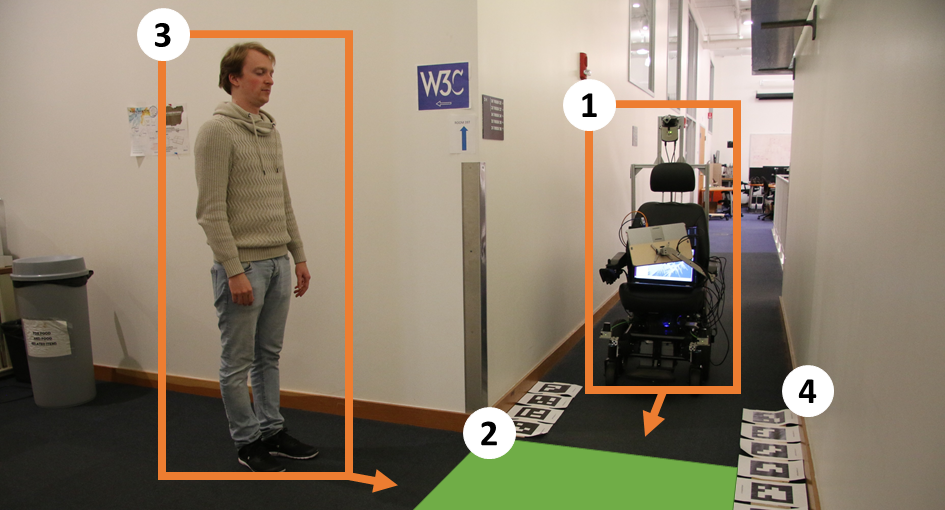
Autonomer Roboter (1) und Person (3) befinden sich auf Kollisionskurs. Unser Algorithmus kann nun in der Region (2) ein schwaches Lichtsignal erkennen und entsprechend autonom reagieren.
Die Patentanmeldung ist gestartet
Wird die Technologie auch schon bei den etablierten Playern der Automobilbranche eingesetzt?
Wir haben unser System im November 2018 auf der IEEE International Conference on Intelligent Transportation Systems (ITSC) vorgestellt. Unser Partner das Toyota Research Institute (TRI) hat auch eine Patentanmeldung gestartet. Noch ist das System eher auf einem Forschungslevel und nicht produktreif. Wir haben sozusagen erstmal ein „proof-of-concept“ vorgelegt.
Welche weiteren Einsatzgebiete neben dem „Automatisieren Fahren“ sind mit der Technologie noch denkbar?
In erster Linie war unser Ziel neue Wege mit existierenden Sensoren zu erkunden speziell für autonome Systeme. Auch als Fahrerassistenzsystem könnte diese Idee angewendet werden. Die Frage ist, wie können wir noch mehr Informationen unserer Umgebung wahrnehmen und verarbeiten? Je besser unsere „situational awareness“ ist, desto sicherer können wir Entscheidungen mit einem (teil-) autonomen System treffen.
Mit Strategie zum Start-up
Was macht euer Startup?
Das Startup Venti Technologies arbeitet an „shared mobility” auf privatem Eigentum und Wegen. Wir haben uns beispielsweise angeschaut, wie ältere Menschen in den USA leben und auch wie sich so ein Produkt in China etablieren könnte. Viel mehr Details können wir wettbewerbsbedingt noch nicht geben.
Wie hat es angefangen?
Zwei Professoren und eine erfahrene Gründerin haben mich angesprochen, ob ich sozusagen als Junior Mitgründer ein Self-Driving Car Startup mitaufbauen möchte. Wir haben dann in gutes Gegenüber in China gefunden und letzten Sommer unterstützte ich unseren „product launch“ dort. Wir waren auf dem Zero One Technology Festival 2018 in Shenzhen (in der Nähe von Hong Kong). China ist ein faszinierendes Land und das Interesse an neuen Technologien und Produkten ist enorm. Auch der Staat setzt mit dem Plan „Made in China 2025“ starke Akzente ich Richtung R&D intensive Produktentwicklung.
Was waren die größten Herausforderungen?
Wir haben einige Jahre an selbstfahrenden Autos gearbeitet und dann überlegt, wie wir die Technologie in einem „consumer product“ einsetzen können. Eine „go-to-market“-Strategie erstellen, erste „user“ finden und die „value proposition“ herausarbeiten waren wichtige Schritte für uns.
Felix Naser graduierte vom MIT in Electrical Engineering & Computer Science, ist Mitgründer eines Self-Driving Car Startups in China und wird beim Location-Based Services Team von BMW einsteigen. Er wurde mit mehr als sieben Stipendien ausgezeichnet und seine Forschungsergebnisse wurden bei IEEE Konferenzen publiziert. Seit 2012 ist er VDI-Mitglied. Über seine Mitarbeit zukünftige Mobilität betreffend wurde unter anderem vom ZDF, NBC, Wired, TechCrunch, MIT, TUM und dem Boston Globe berichtet.
Interview: Claudia Kehl
Kommentare
Bisher hat noch kein Besucher einen Kommentar hinterlassen.Diskutieren Sie mit uns *Pflichtfelder